
Medical Robots
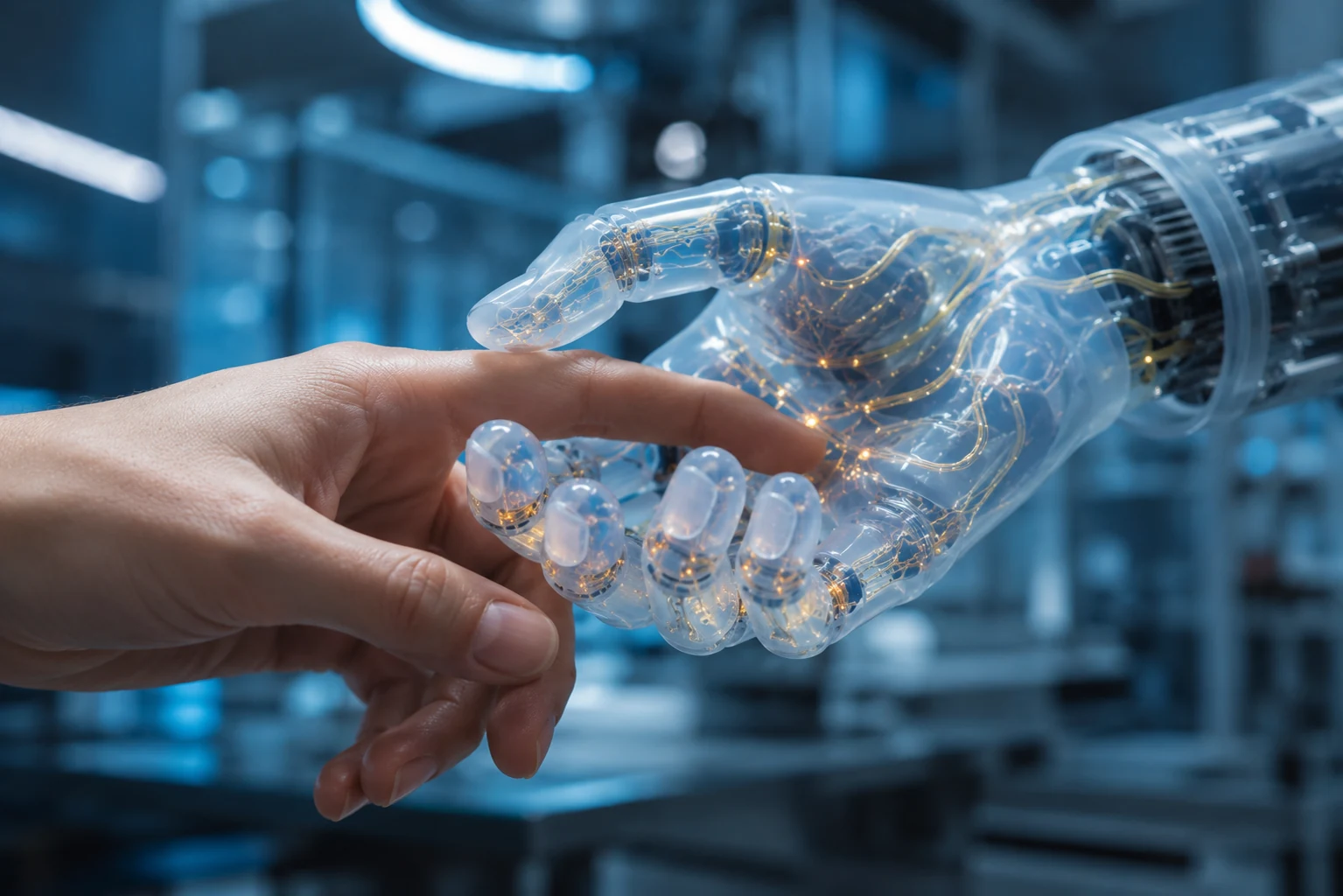
A soft robot could assist with therapy, gentle handling, surgical support, or patient care where rigid machines are risky.
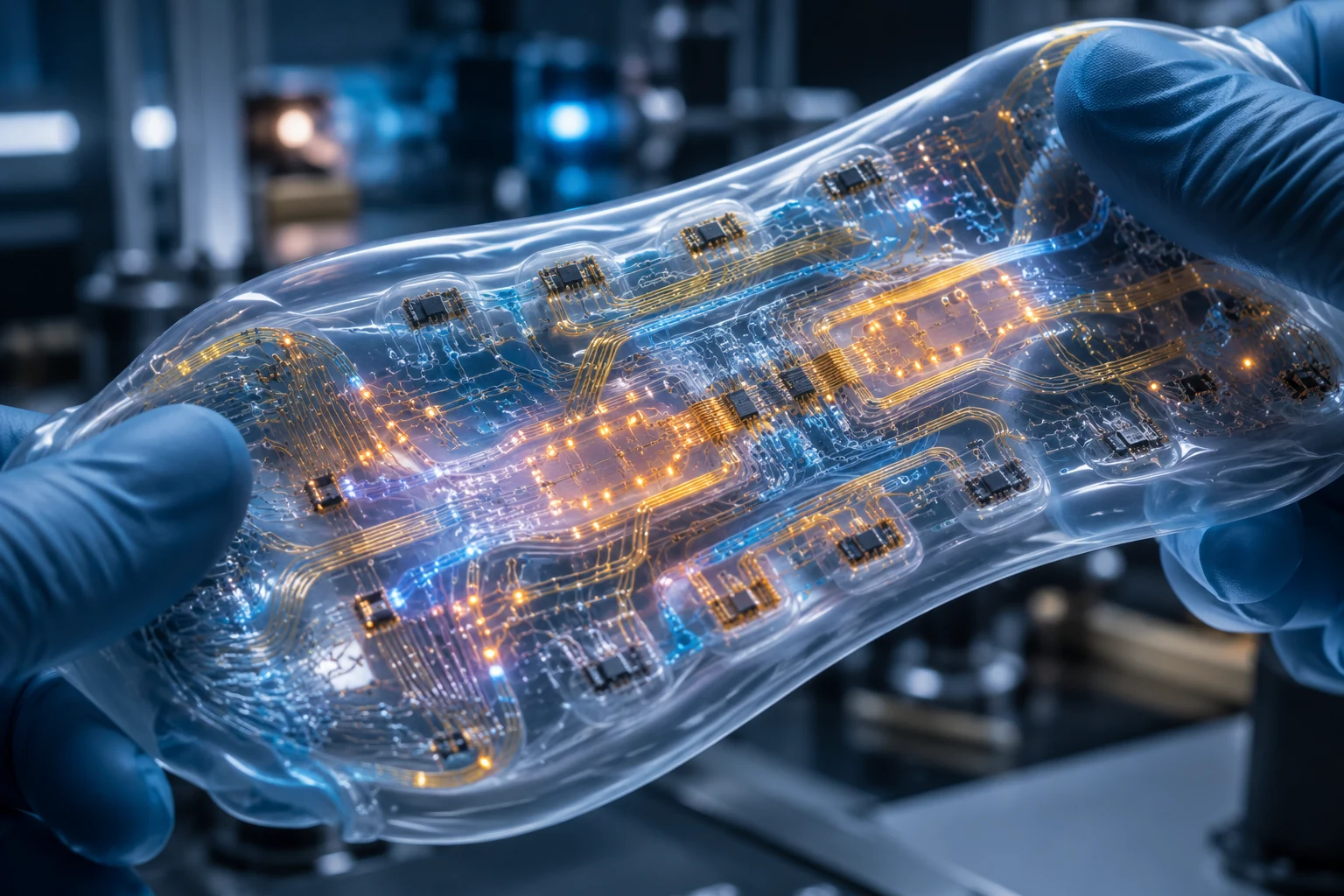
A rubber computer might sound like science fiction at first, but researchers are already proving the idea works: a robot can process simple information with soft valves, air pressure, and flexible channels instead of relying only on rigid electronics.
When you hear the word “computer,” you probably imagine a rigid circuit board packed with chips, wires, and electronics. That is the normal version. But at a deeper level, a computer is simply a system that takes input, follows rules, and produces output.
That means the “thinking” part does not always need to happen inside a hard silicon chip. It can also happen through pressure, airflow, liquid movement, mechanical switching, light, chemistry, or even biology. Soft rubber computers use that broader definition.
Soft robots are designed to flex, stretch, and safely interact with the world around you. They can squeeze through tight gaps, wrap around fragile objects, help patients, or move more like living creatures than machines. But many soft robots still rely on hard controllers, hard valves, hard circuit boards, or off-board electronics.
That creates a mismatch. The robot body is soft, but the brain and control system are stiff. If the hard parts break, snag, puncture the robot, or limit movement, the soft robot loses its biggest advantage.
Compliance means the robot can deform instead of resisting force. A compliant robot can safely absorb contact. That is why soft robots matter for medicine, elder care, prosthetics, wearable devices, and rescue work.
Digital logic is usually explained with electricity. A wire has voltage or it does not. That gives you a 1 or a 0. But in soft robotics, air pressure can play the same role.
Imagine you are designing a soft robotic gripper that should close only when two things happen at the same time: it touches an object and pressure is available. That is basically an AND gate. Both conditions must happen before the robot acts.
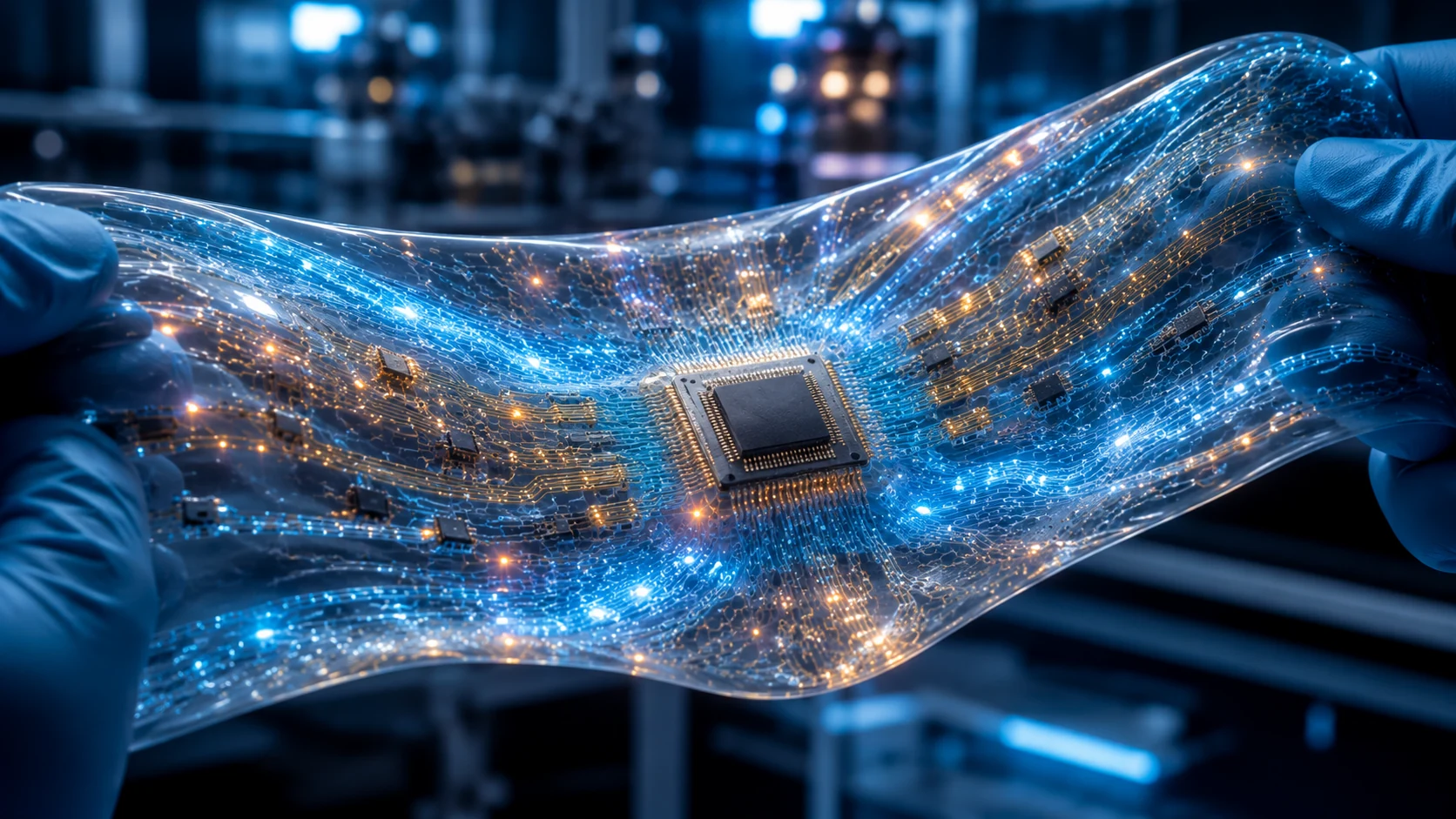
The rubber computer breakthrough showed that soft robots can use soft digital logic without needing the usual rigid valves and electronics. In one demonstration, a soft robot attached to a balloon could dive and surface in water using a soft rubber computer to control when it changed behavior.
That matters because it shows the controller itself can become part of the soft robotic system instead of being a rigid box attached to it. The robot is not just a soft shell wrapped around hard parts. The logic itself can be soft.
Pressure moves through a soft channel like information moving through a wire.
A flexible valve opens or closes depending on the pressure state.
The circuit routes the pressure signal based on a rule such as AND, OR, or NOT.
The output changes the robot’s behavior: bend, grip, release, float, dive, or move.
Traditional robots often win at strength and precision. Soft robots win when the world is unpredictable.
Built for repeatable tasks. Great at welding, lifting, placing parts, and moving with precision. But it usually needs careful safety barriers around you.
Built for contact and adaptation. Better for fragile objects, medical work, human assistance, wearable support, and environments where rigid machines struggle.
A soft robot could assist with therapy, gentle handling, surgical support, or patient care where rigid machines are risky.

Octopus arms, elephant trunks, tongues, and muscles show that flexible bodies can solve problems rigid bodies cannot.

Soft logic could help smart sleeves, rehabilitation braces, prosthetic supports, or future assistive clothing react naturally to movement.
One of the most fascinating ideas in soft robotics is that the robot’s body itself can help solve problems. A robot does not always need to calculate every tiny movement. Sometimes the shape and material of the body can do part of the work.
A soft gripper naturally conforms around an object. A soft crawler naturally deforms against the ground. A flexible sleeve naturally follows a human arm. That built-in behavior is often called mechanical intelligence.
Mechanical intelligence means the robot’s body design reduces the amount of computation needed. The shape, softness, and material properties help create the behavior.
A rubber computer is not going to replace a gaming PC, smartphone, or AI server. That is not the point. Soft logic is currently slower and less powerful than traditional silicon electronics.
The point is compatibility. A soft robot needs a control system that can survive bending, pressure, contact, stretching, and deformation. That is where soft logic becomes useful.
Speed, memory, large-scale computation, machine learning, vision systems, wireless communication, and complex software.
Embedded reflexes, simple control, safe contact, harsh deformation, soft-bodied machines, and environments where hard parts are a liability.
The future you may eventually see will probably combine both worlds: powerful silicon AI for high-level decision making and soft rubber logic for local reflexes inside the robot body. That is a realistic path. The robot might use hard electronics where they make sense, and soft logic where softness is essential.
That hybrid future could lead to safer elder-care robots, better prosthetics, soft exosuits, search-and-rescue crawlers, underwater soft machines, and medical devices that move through the body with less damage.
I changed this section so the videos are direct embeds with backup YouTube links. If an embed is blocked by a browser, the “Open on YouTube” button still works.

Shows the idea of an entirely soft autonomous robot and why researchers care about removing hard components.
Explores the idea of soft robots using air-powered control rather than normal rigid electronics.

This backup card links directly to the Wyss Institute video channel so you can explore soft robotics research without a broken embed.
How AI may translate brain signals into speech.
Microscopic machines and synthetic cell robotics.
How robotics may support safer aging at home.
This article teaches the core ideas behind soft rubber computing, soft pneumatic digital logic, Harvard/Wyss soft robot research, the PNAS paper “Digital logic for soft devices,” and related work on electronics-free soft robotic control.