Robot Hunts Invasive Lionfish
See how robotics can target invasive lionfish near coral reefs.
Lionfish are damaging reef ecosystems faster than divers can remove them. Underwater robotics, AI detection, and autonomous drones are giving conservation teams a stronger way to fight back.
Lionfish are invasive predators in the Atlantic, Caribbean, and Gulf regions. They eat native reef fish, reproduce quickly, and have few natural predators in invaded waters. That creates a serious problem for reefs, fisheries, tourism, and ocean biodiversity.
This is exactly where robotics makes sense: the problem is repetitive, dangerous, underwater, and too large for humans to solve by hand alone.
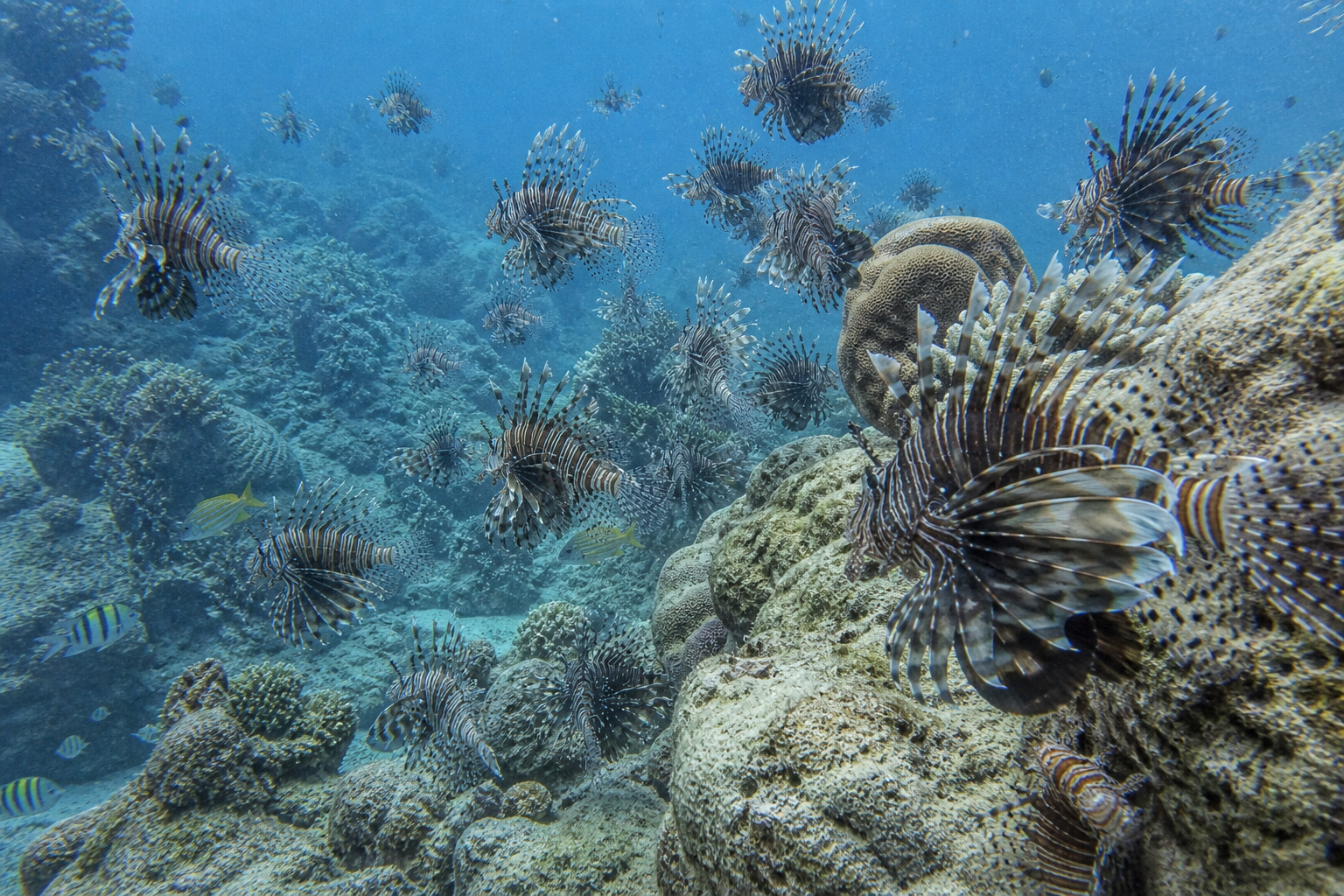
Lionfish can throw reef ecosystems out of balance.
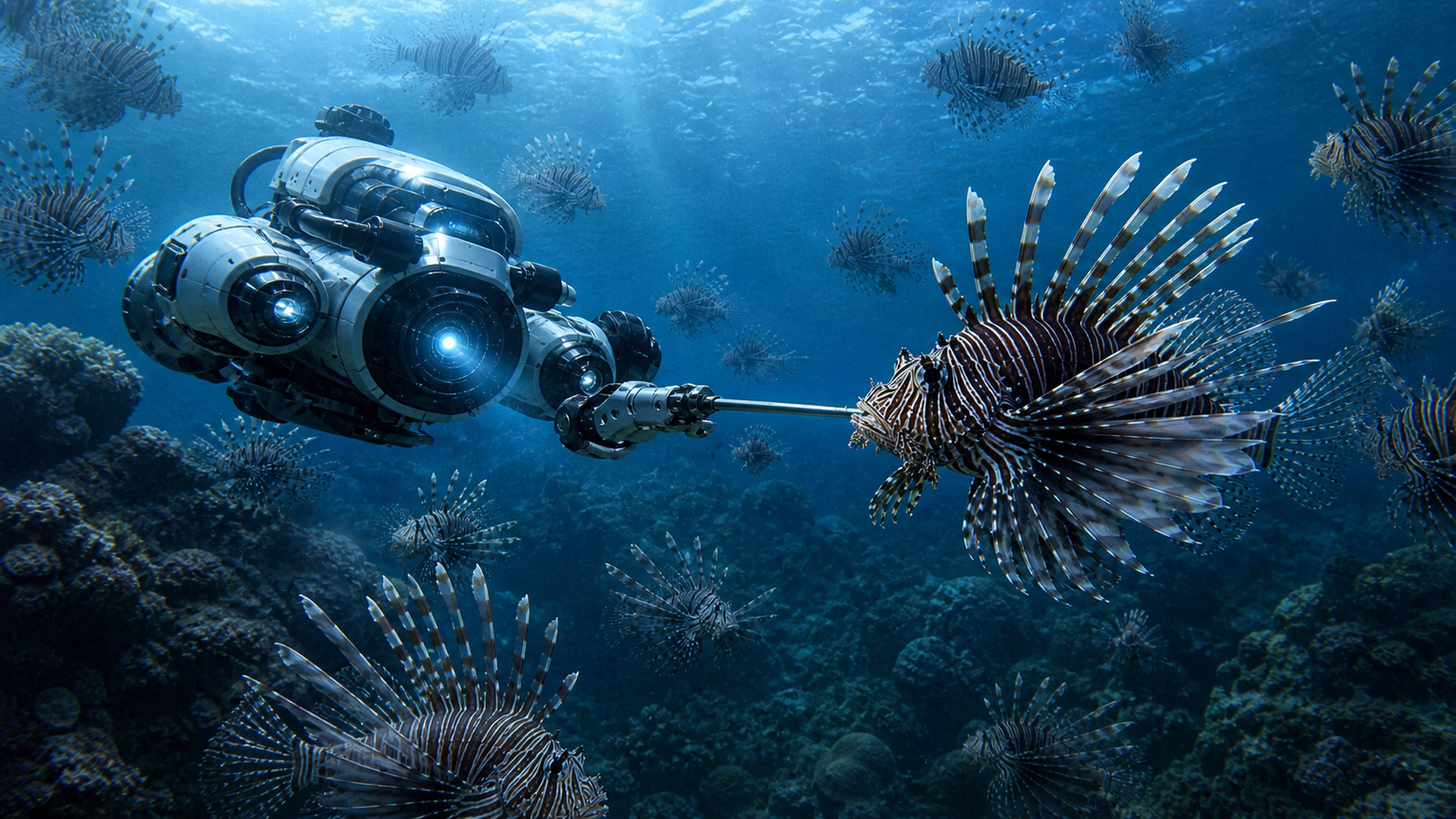
Underwater robots can help locate, track, and remove lionfish in areas where divers may be limited by depth, time, or safety.
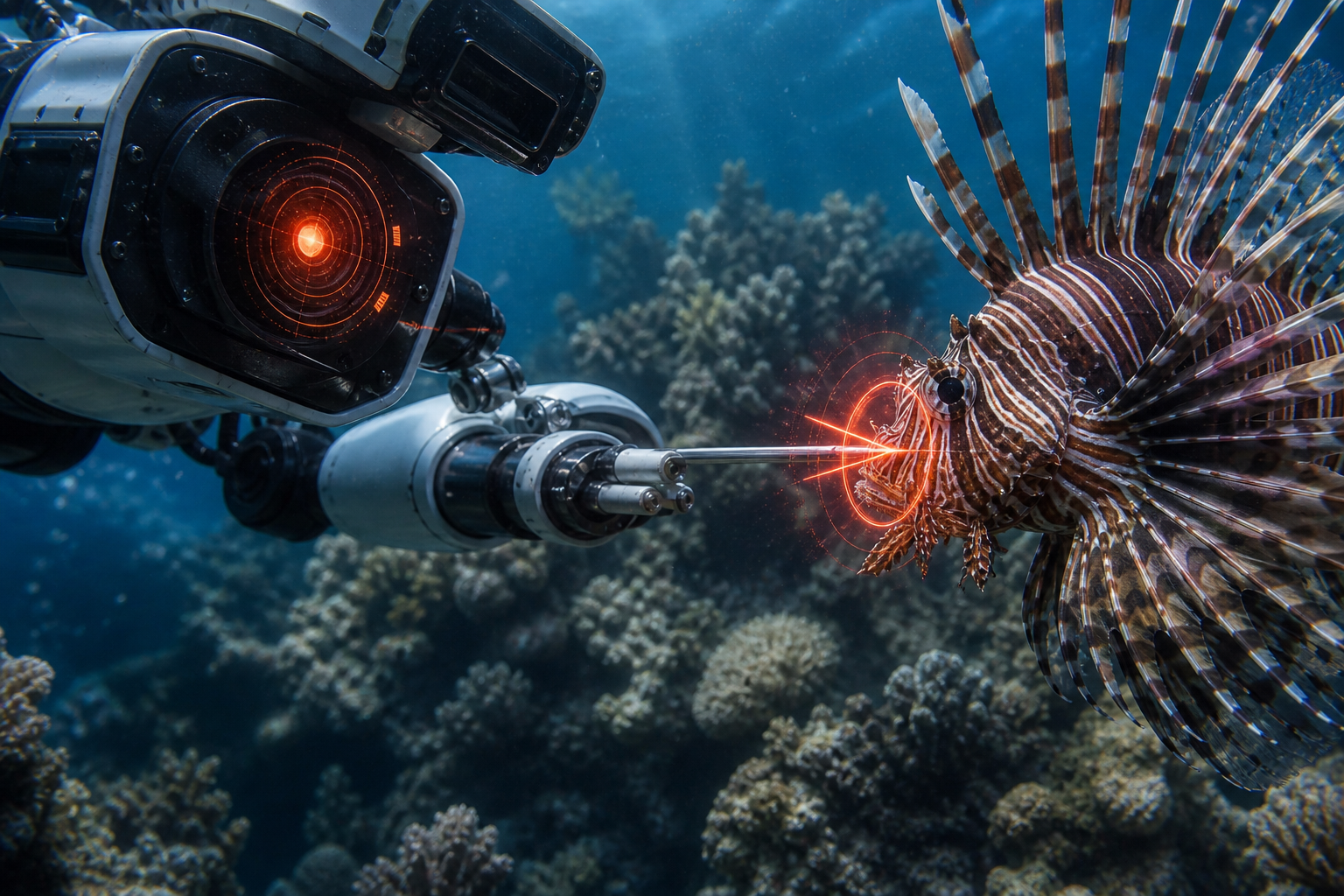
Precision tools help remove invasive lionfish while protecting reef structure.
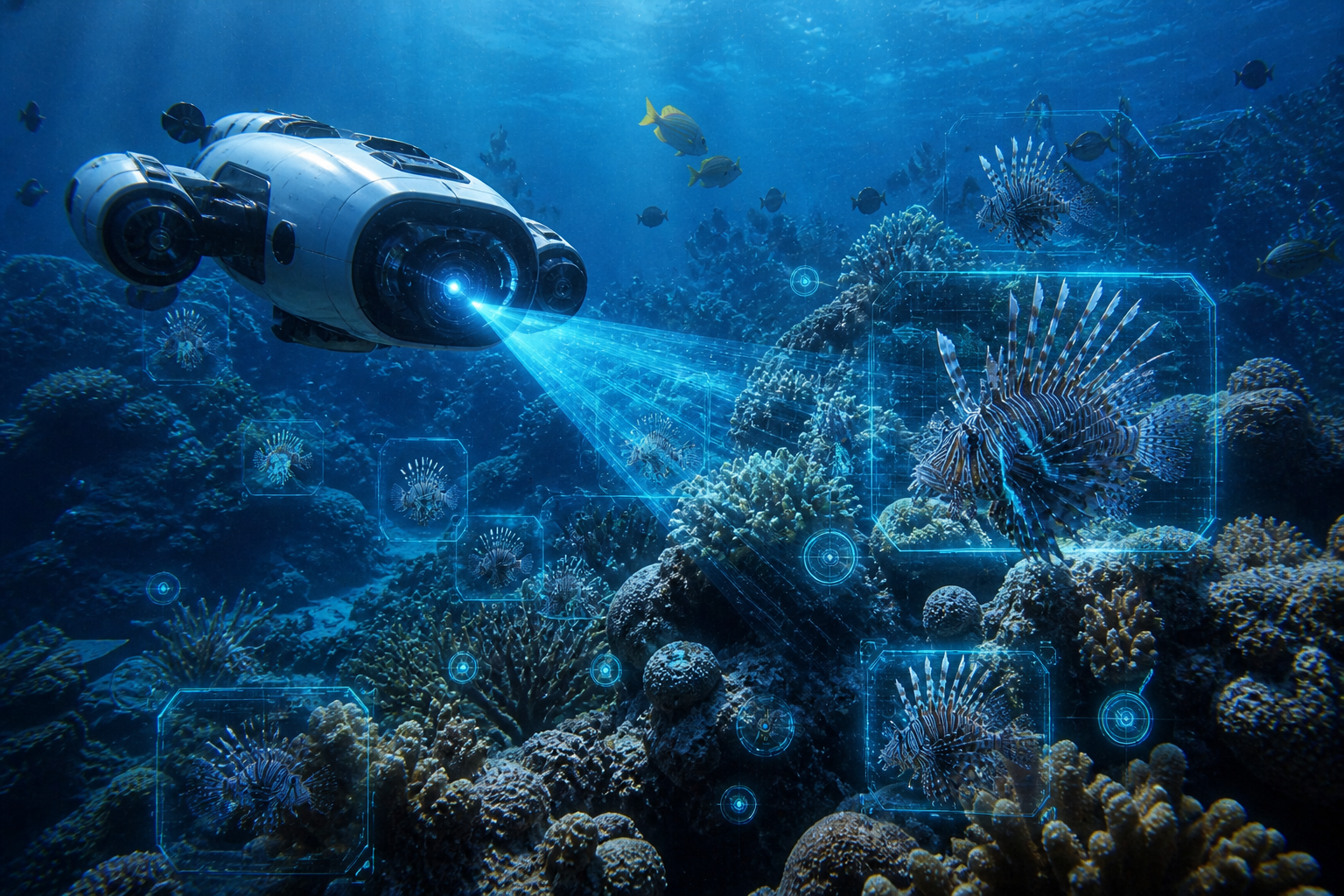
AI-powered reef scanning can help locate lionfish populations faster.
Click any video card to open a larger pop-out player. This keeps the page cleaner and avoids broken inline embeds.
See how robotics can target invasive lionfish near coral reefs.
Why lionfish are such a serious threat to reef ecosystems.
How underwater drones and AI can monitor reefs and marine life.
If lionfish keep spreading unchecked, reef fish populations can drop, reef balance can suffer, and coastal communities can feel the hit through fishing and tourism. Human divers are important, but they cannot scale everywhere.
Robotics gives conservation teams another tool: deeper reach, longer monitoring, repeatable removal, and data-driven targeting.
Ocean robotics turns a hard conservation problem into a scalable technology mission.
Use these search terms to explore the topic further: invasive lionfish robotics, Guardian LF1 lionfish robot, underwater drones coral reef monitoring, AI marine conservation, lionfish reef damage, ocean robotics conservation.
Start with beginner-friendly Raspberry Pi kits, sensors, cameras, and robotics parts.
View Robotics Gear